
زبان


























-
الیکٹرو مکینیکل یونیورسل ٹیسٹنگ مشین
- ہائیڈرولک یونیورسل ٹیسٹنگ مشین
- خودکار ٹیسٹنگ سسٹم
-
افقی ٹینسائل ٹیسٹنگ مشین
-
elastomeric بیئرنگ ٹیسٹنگ مشین
-
کمپریشن ٹیسٹنگ مشین
-
اعلی درجہ حرارت رینگنا ٹیسٹنگ مشین
- اثر ٹیسٹنگ سسٹم
-
متحرک جانچ کے نظام
-
ٹورسن ٹیسٹنگ مشین
-
موڑنے والی ٹیسٹنگ مشین
- خصوصی ٹیسٹنگ مشین
- غیر دھات کی جانچ مشین
- سختی ٹیسٹر
- میٹالگرافک تیاری کا سامان
-
خوردبین
ڈبل اسٹیشن ٹورسن ٹیسٹنگ مشین
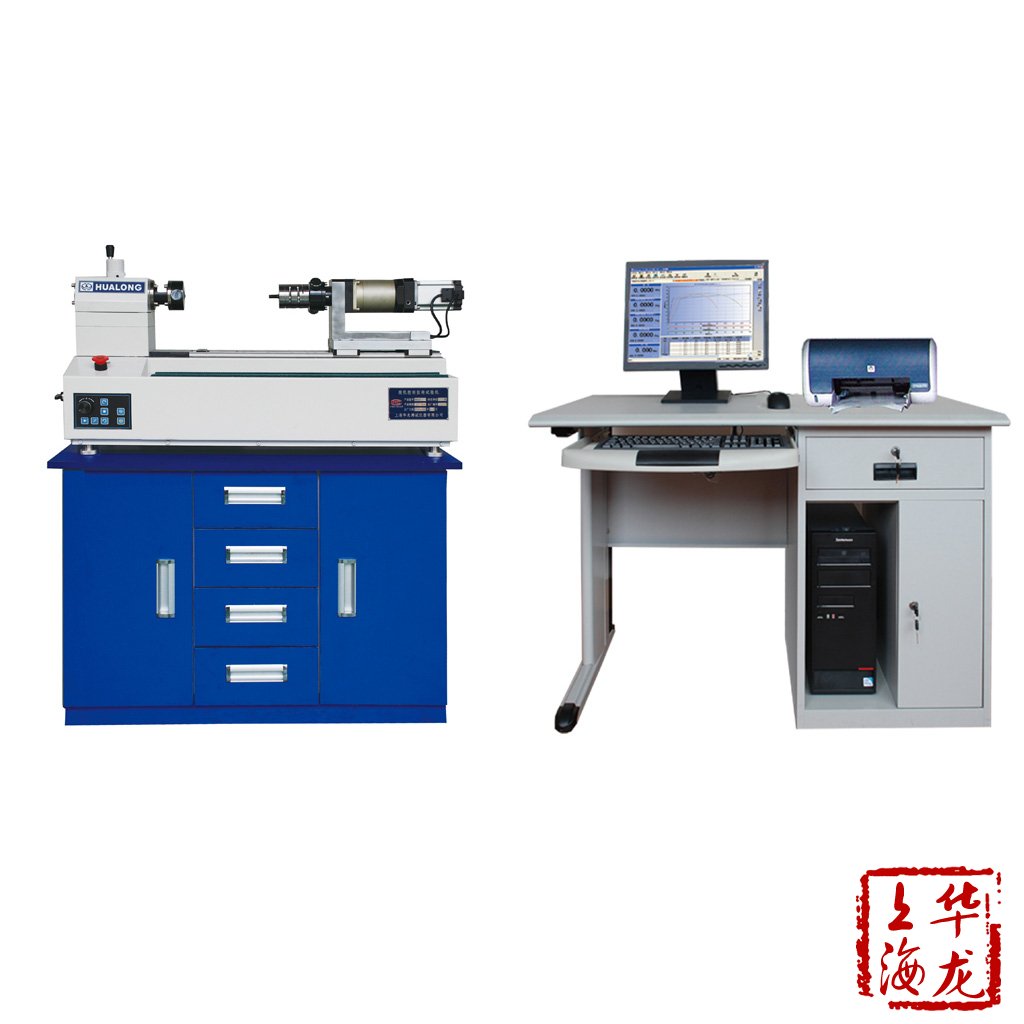
مین مشین ایک اڈے ، گاڑی کا جسم (کمی مشین باڈی اور بوجھ سینسر باڈی) اور مائکرو کمپیوٹر پیمائش کے نظام پر مشتمل ہے۔ گاڑی کے جسم پر لگائی گئی لوڈنگ میکانزم فریم ریل پر آزادانہ طور پر پھسل سکتا ہے۔ لوڈنگ میکانزم نمونے پر ٹارک لگانے کے لئے پیناسونک سروو موٹر کے ذریعہ کارفرما ہے۔ ٹورک ویلیو اور نمونے کا سخت بوجھ سینسر کے ذریعہ ماپا جاتا ہے ، اور ٹورسن زاویہ فوٹو الیکٹرکلی طور پر انکوڈ کیا جاتا ہے۔ ڈٹیکٹر پتہ لگانے والے سگنل کا پتہ لگاتا ہے اور نمونے کے ٹورسن انڈیکس کی پیمائش اور وکر کی ڈرائنگ کو مکمل کرنے کے لئے اسے پروسیسنگ سسٹم میں منتقل کرتا ہے۔
متحرک ڈسپلے اور ٹارک ، ٹورسن زاویہ اور ٹیسٹ وکر کے کنٹرول افعال کے ساتھ۔
اس میں موڑ زاویہ کے ساتھ ایک صوابدیدی ترتیب ہے ، سیٹ ویلیو تک پہنچ جاتی ہے اور خود بخود فنکشن کو برقرار رکھتی ہے۔
ٹارک ویلیو کو من مانی طور پر طے کرنے کے ساتھ ، سیٹ ویلیو تک پہنچ جاتا ہے اور فنکشن خود بخود برقرار رہتا ہے۔
اس میں بوجھ سخت کرنے کے لئے کوئی ترتیب ہے ، سیٹ ویلیو تک پہنچ جاتی ہے اور خود بخود فنکشن کو برقرار رکھتی ہے۔
زیادہ سے زیادہ ٹارک ویلیو اور کم سے کم ٹارک ہولڈ فنکشن ہے۔
تناؤ کا ایک نقشہ ، اور موڑ زاویہ-ٹورک نقشہ تیار کریں۔
بولٹ قطر میں حصہ لینے والی طاقت کی قیمت کا حساب لگانے کے لئے تھریڈڈ کنکشن جوڑی میں ان پٹ ہوسکتا ہے ، اور مکینیکل پرفارمنس انڈیکس خود بخود حاصل کیا جاسکتا ہے اور ایک مکمل ٹیسٹ رپورٹ پرنٹ کی جاسکتی ہے۔
اس میں ٹیسٹ کے نتائج کو ذخیرہ کرنے کا کام ہے ، اور وہ ٹیسٹ کے نتائج تک رسائی اور پڑھ سکتا ہے ، اور اعداد و شمار اور منحنی خطوط کو دوبارہ متحرک کرسکتا ہے ، جس میں جزوی توسیع اور ڈیٹا میں دوبارہ ترمیم بھی شامل ہے۔
نمونہ کی شرائط خود بخود ذخیرہ کی جاسکتی ہیں ، خود بخود واپس آرہی ہیں ، یا دوبارہ ترتیب دی جاسکتی ہیں۔
اوورلوڈ تحفظ کے ساتھ
متحرک ڈسپلے اور ٹارک ، ٹورسن زاویہ اور ٹیسٹ وکر کے کنٹرول افعال کے ساتھ۔
اس میں موڑ زاویہ کے ساتھ ایک صوابدیدی ترتیب ہے ، سیٹ ویلیو تک پہنچ جاتی ہے اور خود بخود فنکشن کو برقرار رکھتی ہے۔
ٹارک ویلیو کو من مانی طور پر طے کرنے کے ساتھ ، سیٹ ویلیو تک پہنچ جاتا ہے اور فنکشن خود بخود برقرار رہتا ہے۔
اس میں بوجھ سخت کرنے کے لئے کوئی ترتیب ہے ، سیٹ ویلیو تک پہنچ جاتی ہے اور خود بخود فنکشن کو برقرار رکھتی ہے۔
زیادہ سے زیادہ ٹارک ویلیو اور کم سے کم ٹارک ہولڈ فنکشن ہے۔
تناؤ کا ایک نقشہ ، اور موڑ زاویہ-ٹورک نقشہ تیار کریں۔
بولٹ قطر میں حصہ لینے والی طاقت کی قیمت کا حساب لگانے کے لئے تھریڈڈ کنکشن جوڑی میں ان پٹ ہوسکتا ہے ، اور مکینیکل پرفارمنس انڈیکس خود بخود حاصل کیا جاسکتا ہے اور ایک مکمل ٹیسٹ رپورٹ پرنٹ کی جاسکتی ہے۔
اس میں ٹیسٹ کے نتائج کو ذخیرہ کرنے کا کام ہے ، اور وہ ٹیسٹ کے نتائج تک رسائی اور پڑھ سکتا ہے ، اور اعداد و شمار اور منحنی خطوط کو دوبارہ متحرک کرسکتا ہے ، جس میں جزوی توسیع اور ڈیٹا میں دوبارہ ترمیم بھی شامل ہے۔
نمونہ کی شرائط خود بخود ذخیرہ کی جاسکتی ہیں ، خود بخود واپس آرہی ہیں ، یا دوبارہ ترتیب دی جاسکتی ہیں۔
اوورلوڈ تحفظ کے ساتھ
ایک پیغام چھوڑ دو
آپ مجھ سے ای میل کے ذریعے بھی رابطہ کرسکتے ہیں۔ میرا ای میل پتہ ہے info@shhualong.com
تجویز کردہ مصنوعات

LWC-300/500/1000/2000 الیکٹرو ہائیڈرولک سروو تھری سلنڈر موڑنے والی ٹیسٹنگ مشین - LWC سیریز

WCJ-20000/50000/100000 مکمل طور پر خودکار میٹل ڈراپ ویٹ امپیکٹ ٹیسٹنگ مشین (DWTT) - WCJ سیریز

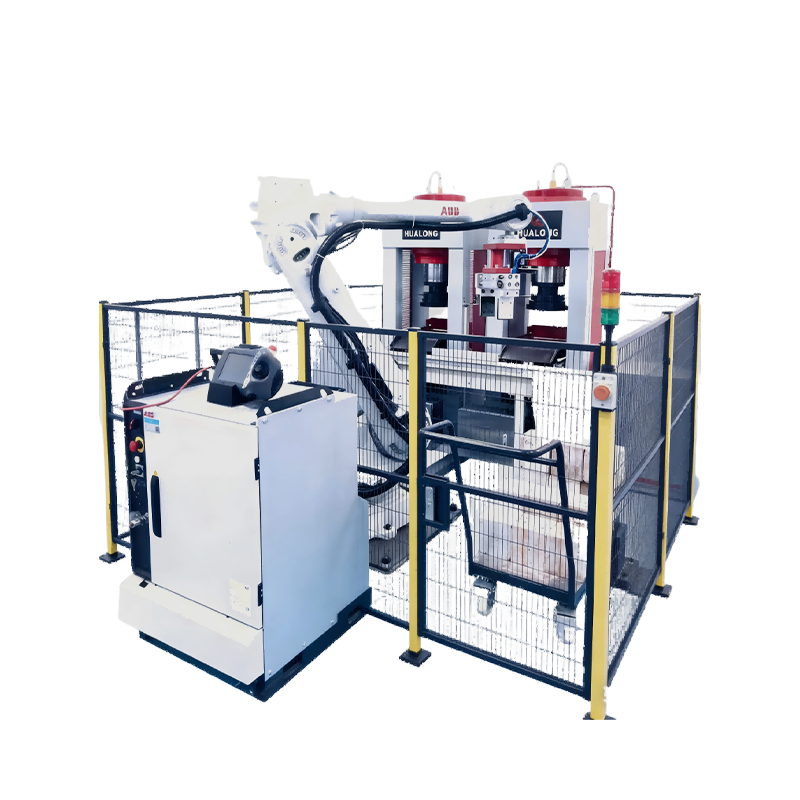
روبوٹک مکمل طور پر خودکار پینڈولم امپیکٹ ٹیسٹنگ مشین - CBD-DR سیریز
مکمل طور پر خودکار روبوٹک کیورنگ اور کمپریشن سٹرینتھ ٹیسٹنگ سسٹم - WHY-G سیریز
مدد کی ضرورت ہے یا کوئی سوال ہے؟
اس بارے میں مزید معلومات کے لئے کہ Hualong جانچ کے ذریعے آپ کی کمپنی کے منافع میں کس طرح مدد کرسکتا ہے ، براہ کرم بٹن پر کلک کریں۔FRIEND LINK:
ہم سے رابطہ کریں
نمبر 389 چونہونگ روڈ ، پڈونگ نیو ایریا ، شنگھائی 201202 ، چین
Tel: +86 17821945087
Online Service: 7*24h






© 2018 HUALONG All rights reserved. SiteMap
